mBot2 segue la linea del circuito.
Consulta il tutorial ufficiale nella sezione mbot2.
Il pulsante A ferma tutto, compresi i motori

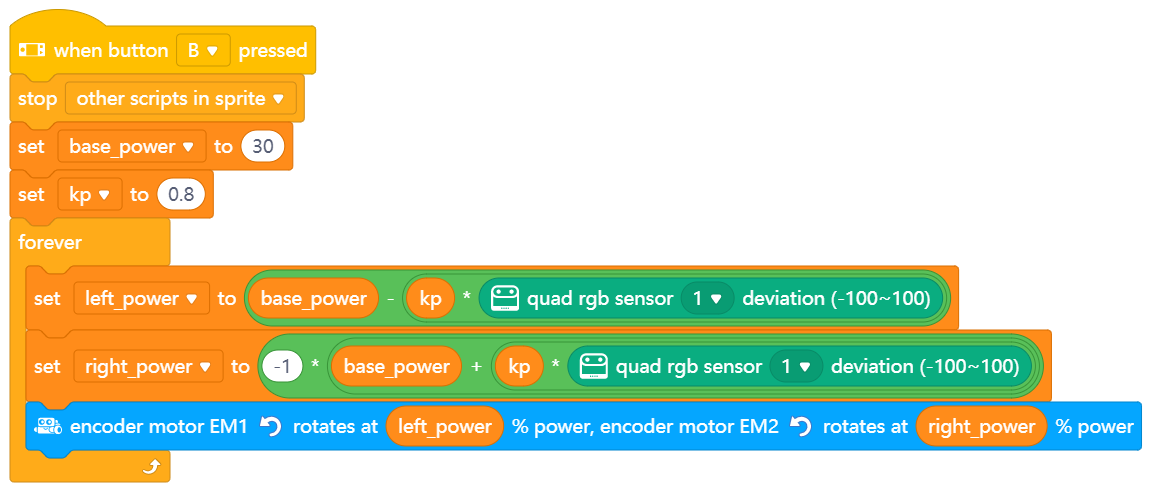
Il pulsante B ferma tutto.
Per sempre imposta la potenza dei due motori in funzione del valore del sensore di deviazione di Quad RGB Sensor.
base_power è un valore di potenza fissa.
kp è un fattore moltiplicativo per sterzare.
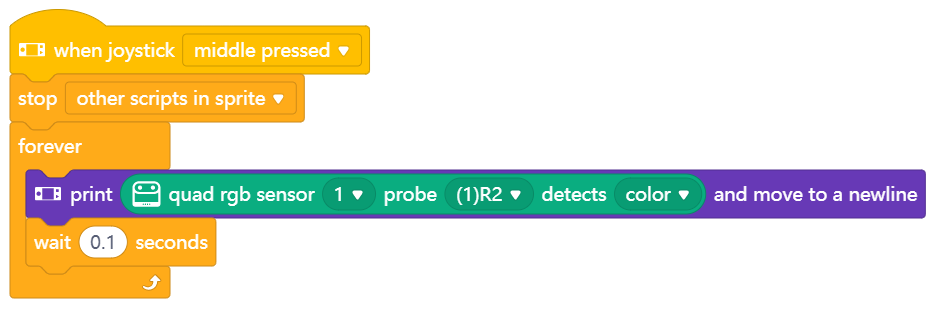
Pulsante centrale del joystick ferma tutto e visualizza il valore di colore del sensore R2