Presentazione ufficiale
Simply put, RUR-PLE is a Python Learning Environment.
With the assistance of a robot named Reeborg, one can explore the fun of programming in the Python language.
A standard Python interpreter is also included as well as an editor with a special “instant run” feature.
L’IDE di RUR-PLE integra 4 schede
- RUR: Read and Learn – Tutorial
- Robot: Code and Learn – L’ambiente di sviluppo
- Python: Code and Learn – La shell Python
- Python: simple editor
RUR: Read and Learn – Tutorial
La documentazione ufficiale può essere consultata all’interno dell’ambiente oppure, più agevolmente, con il browser
C:\Program Files (x86)\RUR-PLE\lessons\en
Contenuto
- About RUR-PLE
- Acknowledgements
- Summary of instructions
- Lessons
SUMMARY OF INSTRUCTIONS
Azioni
- move() – fa un passo in avanti
- pick_beeper() – raccoglie il sonaglio
- put_beeper() – rilascia il sonaglio
- turn_left() – gira a sinistra
- turn_off() – spegne il robot
Controlli
- carries_beepers() – trasporta sonagli?
- facing_north() – guarda a nord?
- front_is_clear() – davanti è libero?
- left_is_clear() – a sinistra è libero?
- next_to_a_beeper() – vicino a un sonaglio?
- on_beeper() – su un sonaglio?
- right_is_clear() – a destra è libero?
Funzioni speciali
- repeat(function, number_of_times)
- for number in range(number_of_times):
function()
Programmazione OOP
- Reeborg=UsedRobot()
- Reeborg.carries_beepers()
- Reeborg.facing_north()
- Reeborg.front_is_clear()
- Reeborg.left_is_clear()
- Reeborg.move()
- Reeborg.next_to_a_beeper()
- Reeborg.on_beeper()
- Reeborg.pick_beeper()
- Reeborg.put_beeper()
- Reeborg.right_is_clear()
- Reeborg.turn_left()
Opzioni avanzate
- set_trace_style(style=1, colour=’sea green’)
- Any colour name recognized by wxPython is acceptable
- style is one of [1, 2, 3, 4, 5] set_delay(time)
- 0 < time < 10 (in seconds)
- Reeborg=UsedRobot(avenues=1, streets=1, orient_key=’E’, beepers=0, name=’robot’, colour=’grey’)
- orient_key is one of ‘E’ or ‘e’, ‘W’ or ‘w’, ‘S’ or ‘s’, ‘N’ or ‘n’.
- Available robot colours are: ‘yellow’, ‘blue’, ‘light blue’, ‘purple’ and ‘green’.
- Any other colour will result in the default (‘grey’) to be used.
- Note that a “serial number” may be appended to the robot’s “name”, so that each robot during an entire play/work session with rur-ple will have a unique name.
- Reeborg.set_trace_style(style=1, colour=’sea green’)
- Reeborg.set_delay(time)
Nuovo robot migliorato
- Guido=RefurbishedRobot() – inherits from UsedRobot
- Guido.turn_right()
- Guido.facing_east()
- Guido.facing_south()
- Guido.facing_west()
- Guido.roll_dice(n=6) – random integer between 1 and n
LESSONS
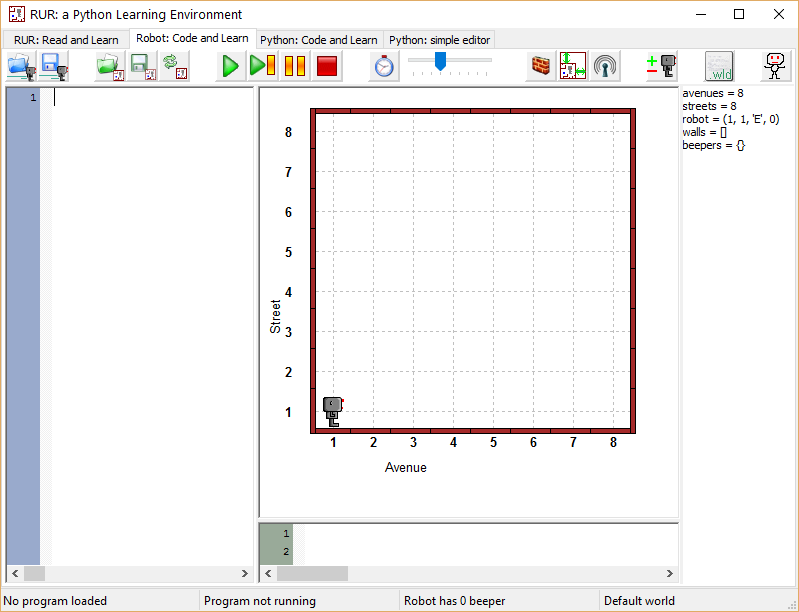
- Il robot si presenta nell’angolo in basso a sinistra rivolto a EST
- Se attivato con il mouse risponde ai comandi
- freccia sinistra, si gira di 90° in senso antiorario
- freccia su, avanza di un passo
- Se provi a superare la cornice esistente appare la finestra di errore
- I comandi sono in inglese e seguiti da ()
- Il programma minimo deve contenere il comando turn_off() (per spegnere il robot…)
turn_off()
- Con move() avanza avanti di un passo
move() turn_off()
- Due passi
move() move() turn_off()
- Il maiuscolo è diverso dal minuscolo e provoca un errore!
Move() turn_off()
- I commenti iniziano con #
# Il mio primo programma move() move() turn_off()
- Si possono creare degli alias per i comandi
avanti = move avanti() turn_off()
- Con turn_left() gira a destra
move() turn_left() move() turn_off()
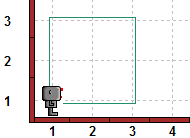
- Disegna un quadrato
move() turn_left() move() turn_left() move() turn_left() move() turn_left() turn_off()
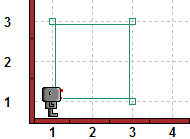
- Disegna un quadrato con lato doppio
move() move() turn_left() move() move() turn_left() move() move() turn_left() move() move() turn_left() turn_off()
- …
- Disegna un quadrato girando in senso orario
turn_left() move() move() turn_left() turn_left() turn_left() move() move() turn_left() turn_left() turn_left() move() move() turn_left() turn_left() turn_left() move() move() turn_left() turn_left() turn_off()
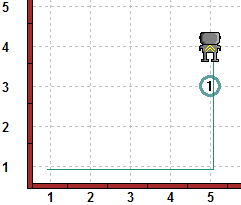
- Sposta il robot (con la tastiera) e scrivi il programma per compiere il percorso di ritorno
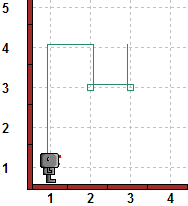
move() turn_left() turn_left() turn_left() move() turn_left() turn_left() turn_left() move() turn_left() move() turn_left() move() move() move() turn_left() turn_off()
- …
- Da … a …
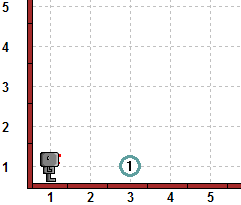
move() move() pick_beeper() move() move() turn_left() move() move() put_beeper() move() turn_off()
- …
move() move() pick_beeper() pick_beeper() pick_beeper() pick_beeper() pick_beeper() move() put_beeper() put_beeper() put_beeper() put_beeper() put_beeper() move() turn_off()
- Con il pulsante
 appare la griglia e con il mouse si possono aggiungere/eliminare pareti
appare la griglia e con il mouse si possono aggiungere/eliminare pareti
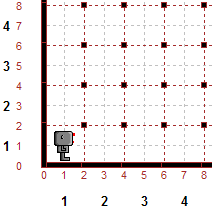
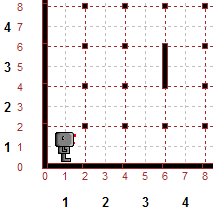
Premendo di nuovo il pulsante la griglia scompare ma le pareti rimangono. - Da … a …
move() move() move() move() turn_left() move() move() turn_left() move() move() turn_left() move() move() move() move() turn_off()
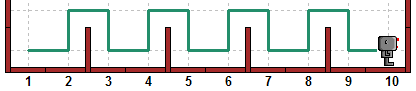
- Consegna del giornale
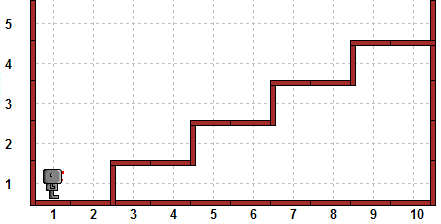
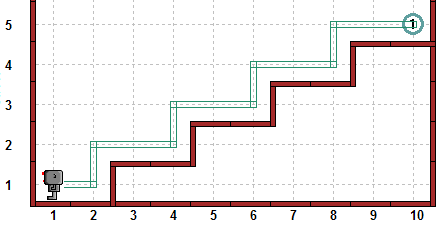
- Saltare gli ostacoli

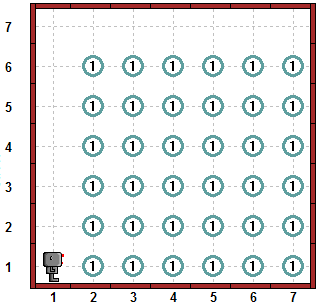
- Tempo di raccolta
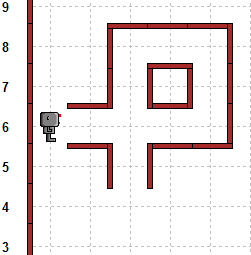
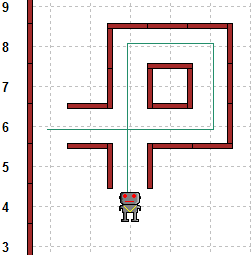
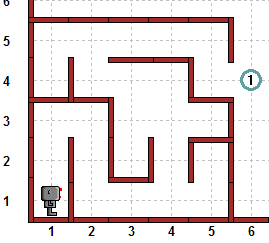
- Uscire dal labirinto
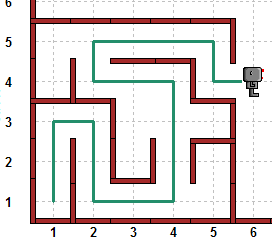
- Tre volte a sinistra equivale a destra
- …

- …
- …
- …


- …
- …


- …


- …
- …
- …
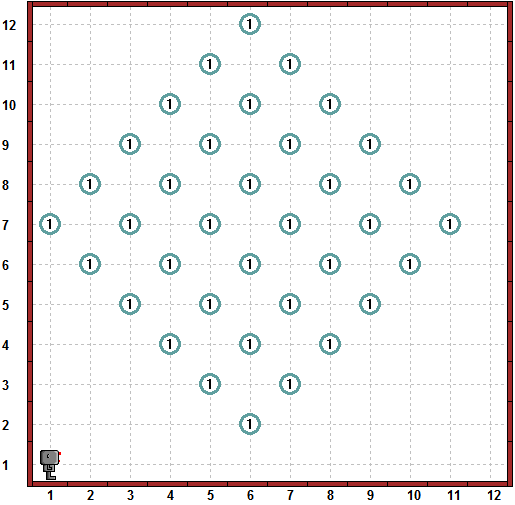
- 3+2=5
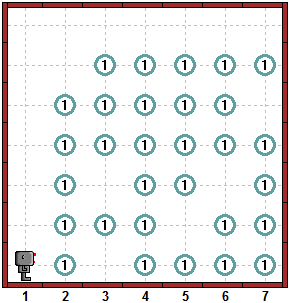
- 8+4=12
- …
Robot: Code and Learn – L’ambiente di sviluppo
L’ambiente di sviluppo
La barra degli strumenti
 Carica un programma
Carica un programma Salva il programma
Salva il programma Carico uno scenario
Carico uno scenario Salvo lo scenario
Salvo lo scenario Reimposta lo scenario
Reimposta lo scenario Esegue il codice
Esegue il codice Esegue passo-passo
Esegue passo-passo Pausa
Pausa Stop
Stop Velocità del robot
Velocità del robot Griglia (Sì/ No)
Griglia (Sì/ No) Pannello: dimensioni dello scenario
Pannello: dimensioni dello scenario Pannello: numero di sonagli
Pannello: numero di sonagli Robot (Sì/ No)
Robot (Sì/ No) Pannello: codice dello scenario (Sì/ No)
Pannello: codice dello scenario (Sì/ No) Carica 4 immagini per il robot
Carica 4 immagini per il robot
























Python: Code and Learn – La shell Python
La shell Python 2.5.2…
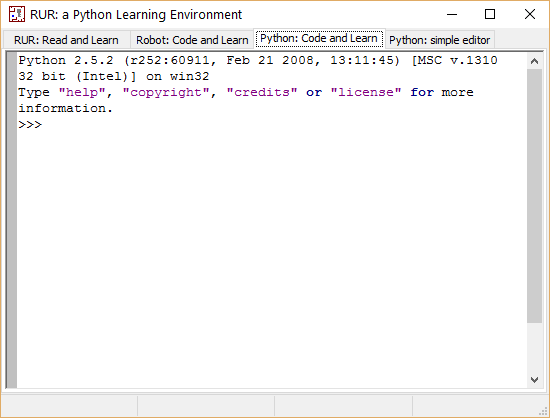
Il progetto è aggiornato fino al 2008 perché l’autore è passato allo sviluppo della versione online.
Python: simple editor
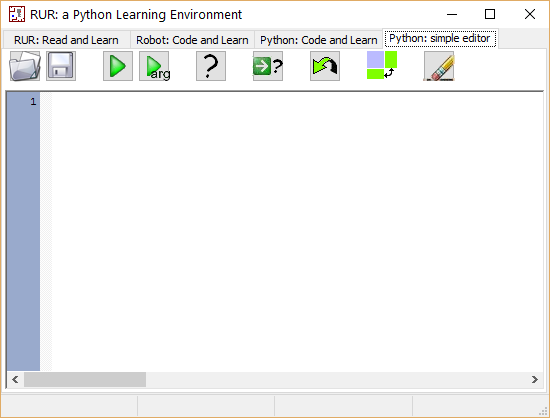 Un editor molto semplice, con pochi strumenti
Un editor molto semplice, con pochi strumenti
 Open Python file
Open Python file Save Python file
Save Python file Run Python file
Run Python file Run Program with argument list
Run Program with argument list Help
Help Go to line number
Go to line number Hide or show output window
Hide or show output window Change layout
Change layout Clear text
Clear text
RISORSE ONLINE
- Ghitub: rur-ple
- Sourgeforge
- Google Code: rur-ple
- Wikipedia: RUR-PLE
- Reeborg’s world (nuova versione online)